 TEXTILES.ORG
TEXTILES.ORG
Company:
Studio Albaghuba
Project Details
Fabric 1
Riverseal® 202 Thermoplastic Polyurethane coated Nylon fabric
Producer/Manufacturer:
OTHER
Primary Use:
Main Fabric
Engineer Name 1
Paolo Beccarelli
Engineer Company 1
Maco Technology srl
Architect Name
Ofir Albag; Martin Huba;
Architect Company
Studio Albaghuba
Please describe the project specifications
The project specifications
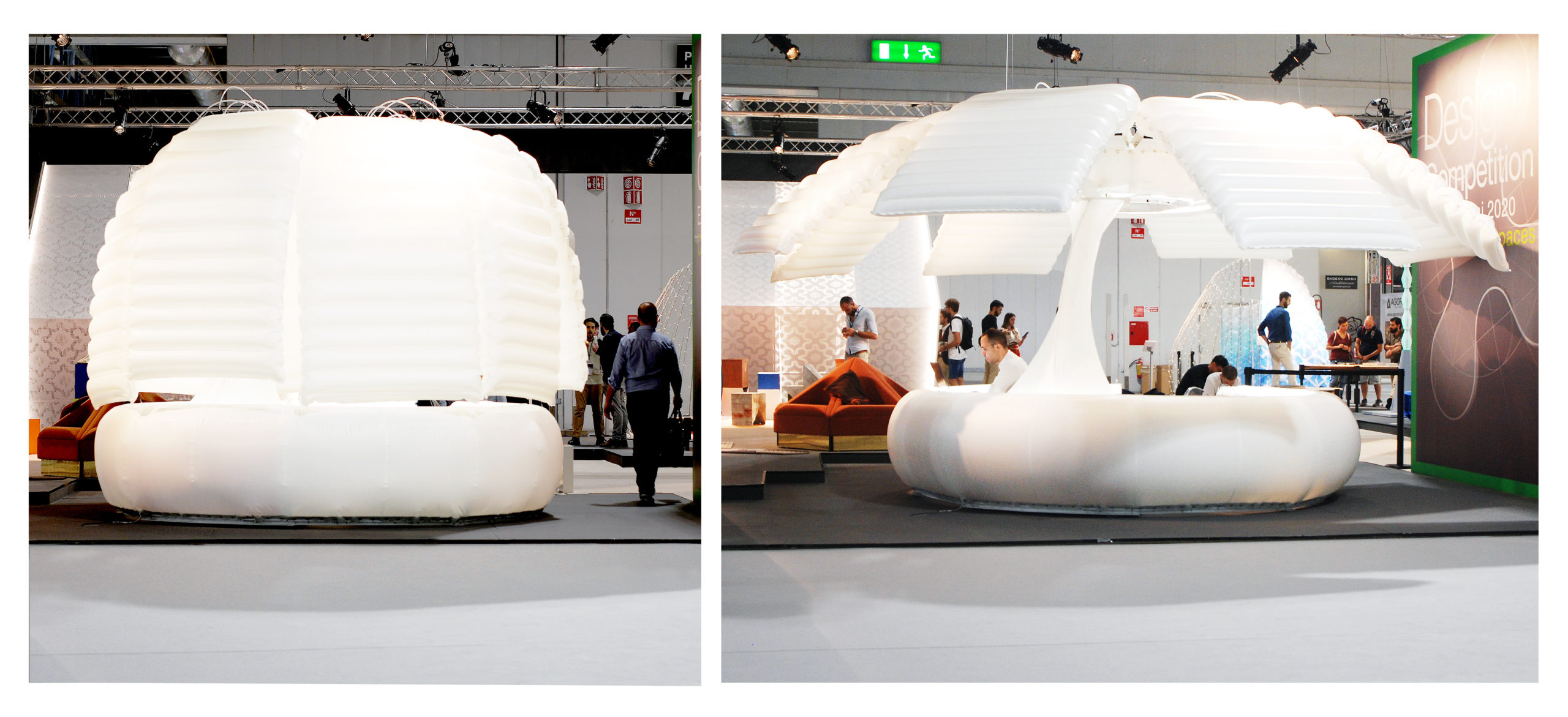
Corolla the co-working pod consists of a modular steel structure that is enclosed by an innovative soft-robotic skin that is able to adapt to changing outdoor conditions, creating a hybrid between indoor and outdoor. The dimensions of the circular pod are 3.5 m in diameter and 2.93 m in height and it is made of a modular steel structure (consisting of 6 table modules and one demountable column module that includes a base, a column, and head pieces) covered with TPU coated Nylon fabric. The pod is featuring a kinetic inflatable envelope system made of 8 ‘petal’ modules of welded 3-layer TPU coated Nylon fabric cushions, 349 cm long and 64 cm and 144.5 cm wide at their ends when deflated.
What was the purpose of this project? What did the client request?
This prototype is the outcome of an independent research project into soft-robotic responsive envelope systems, aimed to create a new, lightweight, adaptive envelope typology to provide increased comfort and an energetically efficient solution for outdoor living and working. Soft robotics is an emerging field in robotics that takes inspiration from invertebrates that are able to move without any rigid body parts. Emulating those biological mechanisms provides significant advantages over traditional rigid robotics, such as reduced weight, cost, and increased robustness and flexibility. The pod was to provide a comfortable, covered outdoor space with workstations for 6 people, fully equipped with LED lighting, charging spots, Wi-Fi, and a climate control system, while aspiring to reduce grid dependency.
What is unique or complex about the project?
Using computer simulations and iterative prototyping we were able to develop an innovative soft-robotic skin system made of eight pneumatic actuators manufactured with TPU coated Nylon fabric. Each of these ‘petals’ is made of two internal air chamber networks, stamped with a special welding pattern, consisting of a series of horizontal welding lines. The distance between the lines has been designed according to the geometry and resistance required, and it is directly related to the maximum curling angle and overall ability to resist gravity and external forces such as wind. Adequate spaces are kept from the edges allowing the circulation of the air in between the chambers. This specific pattern is designed to make the petals curl up or down when the chambers are inflated at different pressures.
The actuators are fixed to the structure using eight folded steel supports which are radially fixed with hinges to the top octagonal frame of the pod, supported by a curved beam cantilevered from the steel base. A pneumatic system connects two air pumps located in the base with each side of the eight actuators, enabling the control of all bottom or top sides of actuators. The column base is strategically positioned on the perimeter of the space, freeing up internal space for collaborative interactions between the users. The pavilion is also equipped with an electric circuit that provides the power distribution to the LED lights and the connection between the sensors the data logger and the controlling system. A tensioned TPU coated Nylon fabric cover gives the column and tables their curvy look.
The inflatable envelope system was designed to be fully automated and its response is controlled by a microcontroller connected to the weather sensors, valves, and air pumps. In this way, on a nice sunny day, the petals are left open to enjoy the natural airflow while providing shade from the sun. In case of a rainy, cold, or extremely hot day, the envelope system closes to protect users from the elements providing a thermally insulated space that can be climatically controlled for optimal comfort of the users.
The pod is also designed to be equipped with a compact HVAC system for heating and cooling, Wi-Fi, charging spots, and a PV solar panel to reduce energy grid dependency.
What were the results of this project?
This project started with a hypothesis and resulted in a full-scale, working prototype. To our knowledge, the application of soft-robotic principles has never been tested successfully before on a large building scale as this, and therefore this attempt could provide valuable proof of concept as to the feasibility and potential of this new technology in the architecture and construction industry. The experience gained during the development of this prototype could provide important insights to similar future endeavors or commercial applications as to the methodology, materials, techniques, geometry, and parameters to consider when designing and fabricating similar soft-robotic envelopes or elements.
What is unique or complex about the project?
Corolla is an innovative prototype that aims to investigate the potential of the use of automation in architecture as well as providing a better understanding of cost-effective pneumatic actuators made of coated fabrics. Such light-weight kinetic systems that use no rigid parts and are activated by air alone are demonstrated to be feasible by this project on a larger scale than previously attempted- on a building scale. By exploiting the flexible, shape-shifting attributes of soft-robotic actuators it is possible to devise highly versatile envelope systems that can accommodate different needs or conditions, such as the shift from an open cover to an enclosed space in Corolla. This novel versatile envelope system, together with supplementary sensing and control systems, provides the opportunity to fully automate this adaptive functionality in an effective and resource-efficient way, much like a living organism.
Content is submitted by the participant. ATA is not responsible for the content descriptions of the IAA award winners.

studio albaghuba

studio albaghuba

studio albaghuba
studio albaghuba



